O potencial elétrico é a capacidade que uma carga tem de realizar trabalho, neste caso, atrair ou repelir outras cargas elétricas.
V ( r ⃗ ) = ∑ i = 1 N V i ( r ⃗ ) V(\vec r) = \sum_{i=1}^N V_i(\vec r) V ( r ) = ∑ i = 1 N V i ( r )
A função potencial é definida a menos de uma constante; essa constante corresponde a mudar o ponto de referência para o caminho escolhido
O campo elétrico E ⃗ → 0 \vec E \rightarrow 0 E → 0 V → V \rightarrow V →
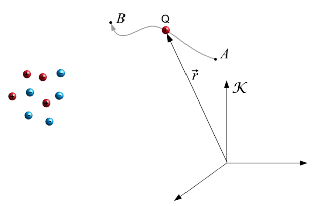
Assim definimos o Potencial V V V r ⃗ \vec r r
V ( r ⃗ ) = − ∫ O r ⃗ E ⃗ ⋅ d l ⃗ V(\vec r) = - \int_O^{\vec r} \vec E \cdot d \vec l\\ V ( r ) = − ∫ O r E ⋅ d l Num caminho de Q → P Q \rightarrow P Q → P
V ( P ) − V ( Q ) = − ∫ Q P E ⃗ ⋅ d l ⃗ E ⃗ = − ∇ ⃗ ⋅ V V(P) -V(Q) = - \int_Q^P \vec E \cdot d \vec l\\
\vec E = -\vec \nabla \cdot V V ( P ) − V ( Q ) = − ∫ Q P E ⋅ d l E = − ∇ ⋅ V O potencial é uma descrição muito económica do campo elétrico.
A partir de uma função escalar podemos calcular as 3 componentes do campo elétrico.
Como ∇ ⃗ × E ⃗ = 0 \vec \nabla \times \vec E = 0 ∇ × E = 0
δ E 1 δ x 2 = δ E 2 δ x 1 , δ E 3 δ x 2 = δ E 2 δ x 2 , δ E 1 δ x 3 = δ E 3 δ x 1 \cfrac{\delta E_1}{\delta x_2} = \cfrac{\delta E_2}{\delta x_1} \ , \ \cfrac{\delta E_3}{\delta x_2} = \cfrac{\delta E_2}{\delta x_2} \ , \ \cfrac{\delta E_1}{\delta x_3} = \cfrac{\delta E_3}{\delta x_1} δ x 2 δ E 1 = δ x 1 δ E 2 , δ x 2 δ E 3 = δ x 2 δ E 2 , δ x 3 δ E 1 = δ x 1 δ E 3 Assim a escolha do ponto de referência é arbitrária e induz ambiguidade mas não tem consequências físicas.
E ⃗ ( r ⃗ ) = 1 4 π ϵ 0 q r 2 e ⃗ r \vec E (\vec r) = \cfrac{1}{4 \pi \epsilon_0} \cfrac{q}{r^2} \vec e_r\\ E ( r ) = 4 π ϵ 0 1 r 2 q e r V ( r ) = − 1 4 π ϵ 0 ∫ ∞ r q r 2 d r = 1 4 π ϵ 0 q r V(r) = - \cfrac{1}{4 \pi \epsilon_0} \int_{\infty}^r \cfrac{q}{r^2} \ dr = \cfrac{1}{4 \pi \epsilon_0} \cfrac{q}{r} V ( r ) = − 4 π ϵ 0 1 ∫ ∞ r r 2 q d r = 4 π ϵ 0 1 r q O campo é nulo e o potencial é constante (≠ 0 \neq 0 = 0
V ( r ) = 1 4 π ϵ 0 q R
V(r) = \cfrac{1}{4 \pi \epsilon_0} \cfrac{q}{R}
V ( r ) = 4 π ϵ 0 1 R q Usando o princípio de sobreposição
V ( r ⃗ ) = 1 4 π ϵ 0 ∑ i = 1 N q i ∣ r ⃗ − r ⃗ i ∣ V (\vec r ) = \cfrac {1}{4 \pi \epsilon_0} \sum_{i=1}^N \cfrac{q_i}{|\vec r - \vec r_i|} V ( r ) = 4 π ϵ 0 1 i = 1 ∑ N ∣ r − r i ∣ q i Para uma distribuição contínua de carga (Volume, superfície ou linha)
V ( r ⃗ ) = 1 4 π ϵ 0 ∫ D ρ ( r ⃗ ′ ) ∣ r ⃗ ′ − r ⃗ i ∣ d τ ′ V (\vec r) = \cfrac {1}{4 \pi \epsilon_0} \int_D \cfrac{\rho (\vec r \ ')}{|\vec r \ ' - \vec r_i|} d \tau \ ' V ( r ) = 4 π ϵ 0 1 ∫ D ∣ r ′ − r i ∣ ρ ( r ′ ) d τ ′ ∇ ⃗ ⋅ E ⃗ = ρ ϵ 0 \vec \nabla \cdot \vec E = \cfrac{\rho}{\epsilon_0}\\ ∇ ⋅ E = ϵ 0 ρ ∇ ⃗ × E ⃗ = 0 \vec \nabla \times \vec E = 0\\ ∇ × E = 0 E ⃗ = − ∇ ⃗ V \vec E = - \vec \nabla V E = − ∇ V ∇ 2 V = ρ ϵ 0 \nabla^2 V = \cfrac{\rho}{\epsilon_0} ∇ 2 V = ϵ 0 ρ Se ρ = 0 \rho = 0 ρ = 0
Para calcular o trabalho mínimo para uma carga Q Q Q A A A B B B F ⃗ = Q E ⃗ \vec F = Q \vec E F = Q E
W = − Q ∫ A B E ⃗ ⋅ d l ⃗ = Q ∫ A B ( ∇ ⃗ V ) ⋅ d l ⃗ = Q [ V ( B ) − V ( A ) ] V ( B ) − V ( A ) = W Q W = - Q \int_A^B \vec E \cdot d \vec l = Q \int_A^B (\vec \nabla V) \cdot d \vec l = Q[V(B) - V(A)]\\
V(B) - V(A) = \cfrac{W}{Q} W = − Q ∫ A B E ⋅ d l = Q ∫ A B ( ∇ V ) ⋅ d l = Q [ V ( B ) − V ( A )] V ( B ) − V ( A ) = Q W Se o quiséssemos mandar a partícula para o infinito o trabalho seria igual a
V ( r ⃗ ) = W Q V(\vec r) = \cfrac{W}{Q} V ( r ) = Q W Isto permite concluir que a força mostra-se conservativa pelo ponto de vista da Mecânica
A energia de uma distribuição de cargas é igual à energia
necessária para as juntar todas desde o infinito (muito longe)
até à sua posições relativas. (Explicação mais detalhada nos slides)
W = 1 2 ∑ i = 1 N q i V ( r ⃗ i ) W = \cfrac {1}{2} \sum_{i=1}^{N} q_i V(\vec r_i) W = 2 1 i = 1 ∑ N q i V ( r i ) V ( r ⃗ i ) V(\vec r_i) V ( r i ) r ⃗ i \vec r_i r i q j ( j ≠ i ) q_j (j \neq i) q j ( j = i )
W = 1 2 ∫ V d q = 1 2 ∫ V ρ V d τ W = ϵ 0 2 ∫ V ( ∇ ⃗ ⋅ E ⃗ ) V d τ W = ϵ 0 2 ( ∫ V E 2 d τ + ∮ S V E ⃗ ⋅ d S ⃗ ) W = ϵ 0 2 ∫ Ω E 2 d τ W = \cfrac {1}{2} \int V \ dq = \cfrac {1}{2} \int_V \rho V d\tau\\
W = \cfrac {\epsilon_0}{2} \int_V (\vec \nabla \cdot \vec E) V d\tau\\
W = \cfrac {\epsilon_0}{2} (\int_V E^2\ d \tau+ \oint_S V \ \vec E \cdot d \vec S)\\
W = \cfrac {\epsilon_0}{2} \int_\Omega E^2 d \tau
W = 2 1 ∫ V d q = 2 1 ∫ V ρ V d τ W = 2 ϵ 0 ∫ V ( ∇ ⋅ E ) V d τ W = 2 ϵ 0 ( ∫ V E 2 d τ + ∮ S V E ⋅ d S ) W = 2 ϵ 0 ∫ Ω E 2 d τ
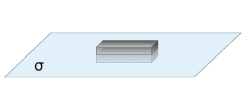
Consideremos uma superfície Gaussiana S S S e e e
∮ S E ⃗ ⋅ d S ⃗ = σ A ϵ 0 \oint_S \vec E \cdot d\vec S = \frac {\sigma A}{ \epsilon_{0}} ∮ S E ⋅ d S = ϵ 0 σ A Quando e → 0 e \rightarrow 0 e → 0
E ⊥ + − E ⊥ − = σ ϵ 0 E_{\perp}^+ - E_{\perp}^- = \frac {\sigma }{ \epsilon_{0}} E ⊥ + − E ⊥ − = ϵ 0 σ Já o potencial é dado por
Onde + + + − - −
Slides: