Programação Paralela
Motivos
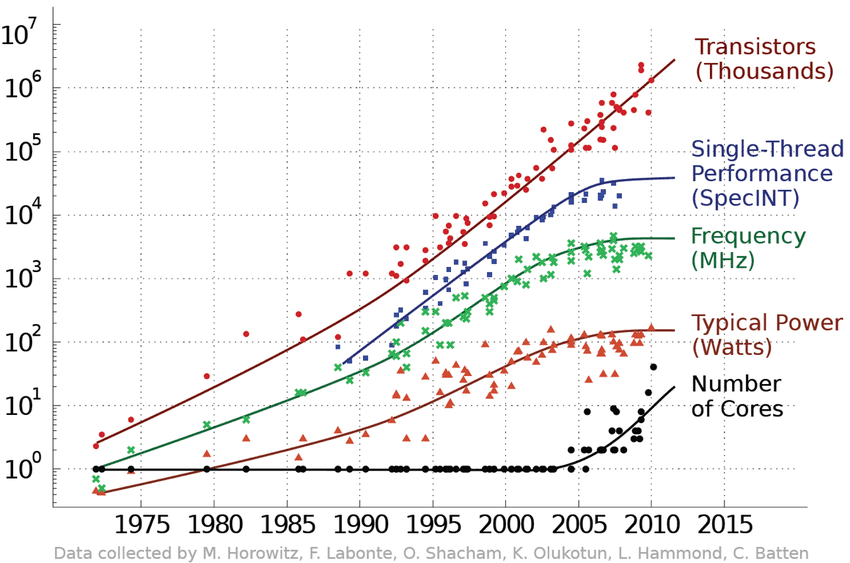
Como podemos ver pelo gráfico mostrado em cima,
o número de transístores aumenta de acordo com a Lei de Moore.
No entanto, a performance de uma thread do processador quase que estagnou no final da década de 2000.
Isso mostra que atualmente colocar mais transístores num processador, não o torna mais rápido.
Foi preciso pensar noutra maneira de continuar a aumentar a performance.
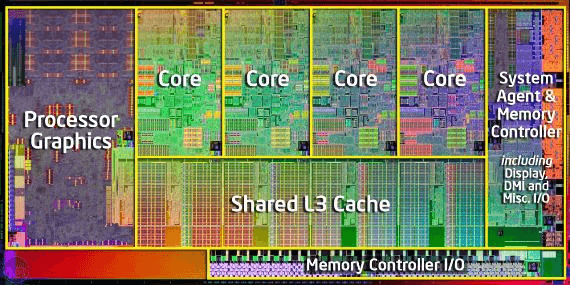
Chegou-se à conclusão de que colocar vários "mini" processadores (cores) dentro do processador,
iria permitir que este pudesse fazer várias instruções em paralelo.
Assim aparecem os dual-cores (2), quad-cores (4), muitos-cores (64):
Melhoramos assim a performance de:
- Interação com periféricos lentos
- Enquanto periférico demora a responder a um fluxo de execução, outro fluxo paralelo pode continuar a fazer progresso
- Programas interativos
- Enquanto um fluxo de execução espera por ação do utilizador, outros podem progredir em fundo
Com Programação Paralela melhoramos a performance de qualquer CPU, até aqueles que só têm 1 core.
Introdução à Programação com Processos
A multiprogragramação consiste na execução, em paralelo, de múltiplos programas na mesma máquina. Cada instância de um programa em execução denomina-se um processo
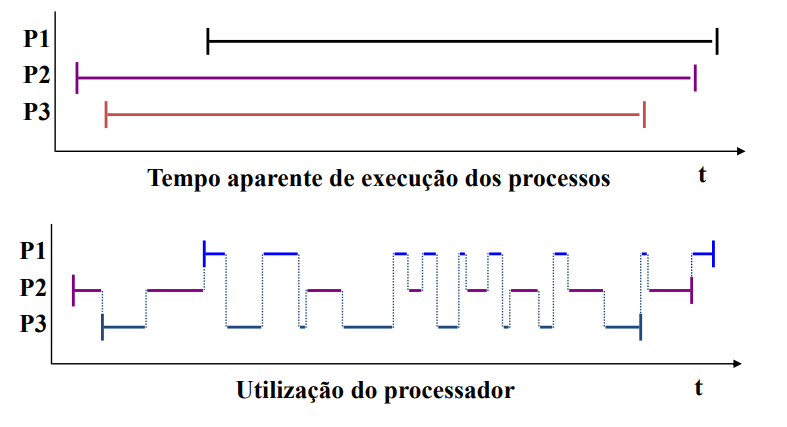
Na realidade só pode estar a correr um processo de cada vez (por unidade de processamento). Contudo, uma vez que um CPU é capaz de executar muitos milhares de operações por segundo, é possível executar a troca de processos em execução no CPU de forma que, para um humano, os processsos parecem correr em paralelo. A isto dá-se o nome de pseudo-concorrência.
Uma vez que vamos falar muito de processos, é relevante estabelecer a diferença entre um programa e um processo:
- Um programa é um ficheiro executável (sem atividade);
- Um processo é um objecto do sistema operativo que suporta a execução dos programas. Mais à frente vamos ver como este objeto é visto pelo SO;
- Um processo pode, durante a sua vida, executar diversos programas;
- Um programa ou partes de um programa podem ser partilhados por diversos processos;
- Bibliotecas partilhadas (e.g DLL no Windows).
Processo
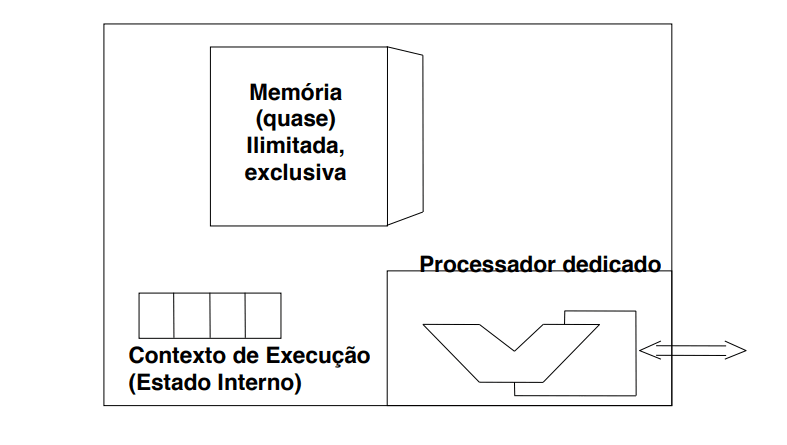
Pelo ponto de vista do processo este encontra-se isolado de tudo resto e com recursos ilimitados.
Tal como uma máquina real, um processo tem:
- Um espaço de endereçamento (virtual):
- Conjunto de posições de memória acessíveis;
- Código, dados e pilha;
- Dimensão variável;
- Um reportório de instruções:
- As instruções do processador executáveis em modo utilizador;
- As funções do sistema operativo;
- Um contexto de execução (estado interno):
- Toda a informação necessária para retomar a execução do processo;
- Memorizado quando o processo é retirado de execução.
Um processo tem algumas propriedades:
- Identificador;
- Programa;
- Espaço de Endereçamento (codigo, dados, pilha);
- Prioridade (vamos ver o que é mais à frente);
- Processo pai;
- Canais de Entrada Saída, Ficheiros;
- Quotas de utilização de recursos;
- Contexto de Segurança.
E operações, i.e, funções sistema que atuam sobre os processos:
- Criar;
- Eliminar;
- Esperar pela terminação de subprocesso.
Programação com Processos em Unix
Em Unix, os processos são identificados por um inteiro (PID). Alguns identificadores estão pré atribuídos, nomeadamente:
- Processo 0 é o swapper (gestão de memória);
- Processo 1
inité o de inicialização do sistema.
Os processos relacionam-se de forma hierárquica. Sempre que é criado um processo, este herda grande parte do contexto do processo pai. Quando um processo termina a sua execução, todos os subprocessos que lhe estão associados continuam a executar-se, sendo adotados pelo processo de inicialização.
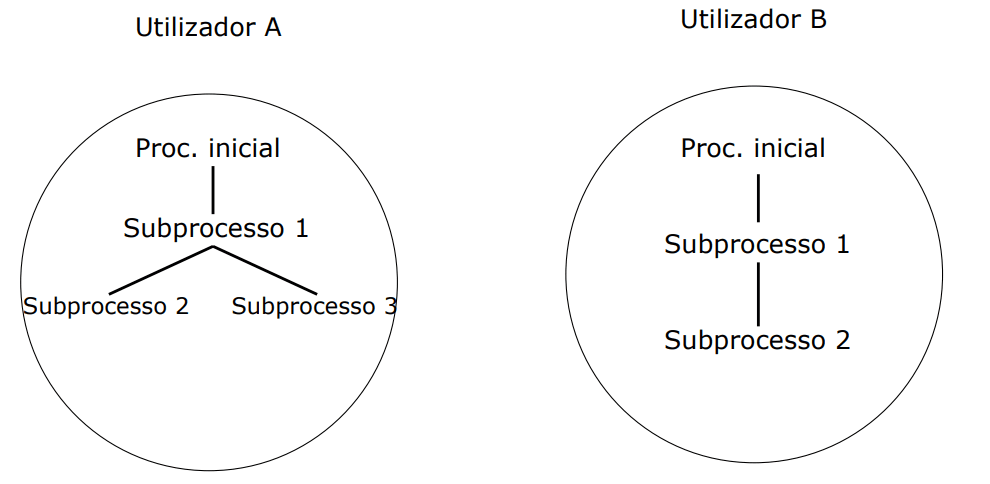
Criação de um Processo
int fork()A função fork (não recebe parâmetros) cria um processo (a que chamamos processo filho) que é uma cópia do processo em que foi criado (a que chamamos processo pai). Nomeadamente, são copiados:
- O espaço de endereçamento;
- O contexto de execução.
Ao copiar o contexto de execução, poderíamos pensar que esse processo iria ser pesado (em tempo e espaço).
Mas na verdade, a chamada fork é muito rápida.
Iremos estudar mais à frente porquê.
O fork apenas permite lançar um processo com o mesmo código.
A função retorna o PID do processo. Este parâmetro assume valores diferentes consoante o processo em que se efetua o retorno:
- ao processo pai é devolvido o PID do filho
- ao processo filho é devolvido 0
- -1 em caso de erro
Exemplo de fork
main() {
pid_t pid;
pid = fork();
if (pid == -1){
// ERRO
}else if (pid == 0) {
// Código do filho
} else {
// Código do pai
}
return 0;
}Terminação do Processo
void exit(int status)A função exit termina o processo em que é chamada, libertando todos os recursos detidos pelo processo, tais como os ficheiros abertos.
A terminação do processo é assinalada ao processo pai.
status é um parâmetro que permite passar ao processo pai o estado em que o processo terminou.
Normalmente um valor negativo indica um erro.
E se a main terminar com return em vez de exit?
Até agora, nunca chamámos exit para terminar programas.
Nem é preciso, o compilador trata disso automaticamente, chamando ele a função exit depois da execução da main.
main_aux(argc, argv) {
int s = main(argc, argv); // Função main do programador
exit(s);
} int wait (int *status)
Esta função para o processo pai até este se sincronizar com a terminação de um processo filho.
waitretorna o pid do processo terminado. O processo pai pode ter vários filhos sendo desbloqueado quando um terminar;- O estado de terminação do processo filho que foi atribuído no parâmetro da função
exité guardado na variável apontada porstatus.
Macros Importantes
Usando man wait poderão encontrar Macros (WIFEXITED, WEXITSTATUS) que ajudam a saber como e se um processo terminou (com exit).
Exemplo de exit e wait
main() {
int pid, estado;
pid = fork();
if (pid == 0) {
// execução de algoritmo pelo filho
exit(0);
} else {
// processo pai bloqueia-se à espera
// da terminação do processo filho
pid = wait(&estado);
}
}Ao se fazer exit são mantidos os atributos necessários para quando o pai chamar wait:
piddo processo terminado e do seu processo pai;statusda terminação.
Entre exit e wait, o processo diz-se zombie.
Só depois de wait é que o processo é totalmente esquecido.
Exemplos
Pai e filho a executarem trabalhos diferentes:
- Pai executa
fnPai(); - Filho executa
fnFilho().
main () {
int r = fork();
if (r == 0) {
// execução de algoritmo pelo filho
fnFilho();
} else if (r > 0) {
// execução de algoritmo pelo pai
fnPai();
}
exit(EXIT_SUCCESS);
}Pai espera pelo resultado do filho:
- Filho: termina devolvendo o retorno de
fnFilho(); - Pai: depois de executar
fnPai(), aguarda até saber o resultado do filho, e imprime soma de ambos.
main () {
int a,r, s;
r = fork();
if (r == 0) {
// execução de algoritmo pelo filho
a = fnFilho();
exit(a);
} else if (r > 0) {
// execução de algoritmo pelo pai
a = fnPai();
wait(&s);
if (WIFEXITED(s))
printf("Total: %d\n", a + WEXITSTATUS(s));
exit(EXIT_SUCCESS);
}
}Executar outros programas
Até agora só vimos como criar uma cópia de um processo que execute o mesmo programa que o pai.
Vamos agora ver como ter o processo filho a executar um programa diferente.
int execl(char* ficheiro, char* arg0, char* argl, ..., argn, NULL)int execv(char* ficheiro, char* argv[])ficheiro é o caminho (absoluto) de acesso ao ficheiro executável.
Os argumentos podem ser passados de duas maneiras:
- Para
execl, passa-se os ponteiros 1 a 1, acabando emNULL(ou0, visto queNULLé só uma constante igual a(void *)0) - Para
execv, passa-se um array de ponteiros
Estes parâmetros são passados para a função main do novo programa e acessíveis através do argv.
Ambas as funções execl() e execv() são front-ends mais simples para execve(), que é a função genérica principal com mais parâmetros.
Exemplo de execl
main() {
int pid;
pid = fork();
if (pid == 0) {
execl("/bin/who", "who", 0);
// controlo deveria ser transferido para o novo programa
printf("Erro no execl\n");
exit(-1);
} else {
// algoritmo do processo pai
}
}Por convenção, o arg0 é o nome do programa.
Implementação de uma shell
Uma shell pode ser descrita muito facilmente por:
-
Ciclo infinito, em que cada iteração:
- Imprime mensagem;
- Lê comando;
- Cria novo processo filho;
- Processo filho deve executar outro programa (indicado no comando lido);
- Entretanto, o processo da shell bloqueia-se até filho terminar;
- Volta à próxima iteração.
while (TRUE) {
prompt();
read_command(command, params);
pid = fork();
if (pid < 0) {
printf ("Unable to fork"); // Erro no fork
continue;
}
if (pid != 0) {
wait(&status); // Se o fork gerar um pai
} else{
execv(command, params);
}
}Introdução à Programação com Tarefas (Threads)
Tarefas
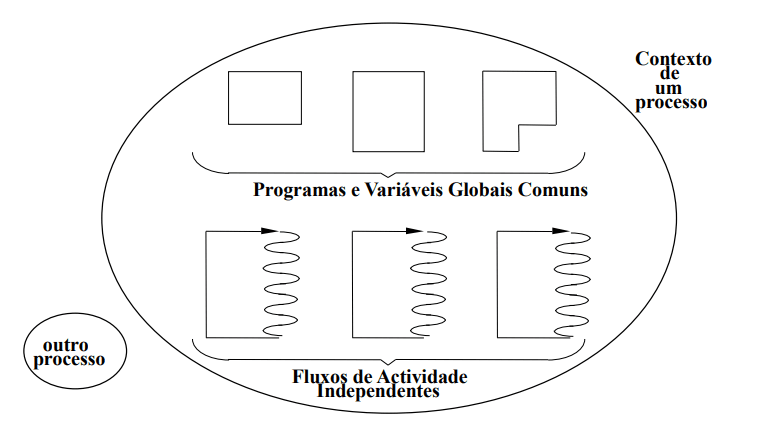
Tarefas (em inglês, threads), são um mecanismo simples para criar fluxos de execução independentes que partilham um contexto comum.
Num mesmo processo, as tarefas partilham entre si:
- O código
- Amontoado (heap)
- Variáveis globais
- Variáveis dinamicamente alocadas (malloc)
- Atributos do processo
Mas não partilham:
- Pilha (stack)
- (atenção) não há isolamento entre pilhas!
- Bugs podem fazer com que uma tarefa aceda à pilha de outra tarefa
- Estado dos registos do processador
- Incluindo instruction pointer
- Atributos específicos da tarefa
- Thread id (tid)
- etc
Programação com Tarefas em Unix (Interface POSIX)
Operações sobre Tarefas
int pthread_create(&tid, attr, function, arg)(man page)
tidé o apontador para o identificador da tarefa;attrdefine atributos da tarefa(prioridade, etc);functioné a função a executar;argé o ponteiro para os parâmetros dados à função.
void pthread_exit(void *value_ptr)(man page)
- Tarefa chamadora termina;
- Guarda ponteiro para resultados no ponteiro
value_ptr.
int pthread_join(pthread_t thread, void *value_ptr)(man page)
- Tarefa chamadora espera até a tarefa indicada ter terminado;
- O ponteiro retornado pela tarefa terminada é colocado em
(*value_ptr).
Note-se como usamos sempre void* (referência opaca) na passagem de parâmetros.
Isto permite que os parâmetros possam ser de qualquer tipo.
Os parâmetros de entrada para a nova tarefa são passados através do último argumento de pthread_create e a nova tarefa recebe parâmetro no argumento único da sua função.
Os parâmetros de saída devolvido pela nova tarefa são colocados no parâmetro de pthread_exit, sendo recebidos pela tarefa criadora através do último argumento de pthread_join (por referência).
Regra de ouro
O núcleo oferece a ilusão de uma máquina com número infinito de processadores, sendo que cada tarefa corre no seu processador. No entanto, as velocidades de cada processador virtual podem ser diferentes e não podem ser previstas.
Esta regra também se aplica a programação com processos paralelos.
Exemplo: Soma das linhas de uma matriz
Num programa para somar linhas de matrizes, podemos codificar uma resolução de várias formas.
Solução sequencial
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#define N 5
#define TAMANHO 10
int buffer[N][TAMANHO];
void *soma_linha(int *linha) {
int c, soma = 0;
int *b = linha;
for (c = 0; c < TAMANHO - 1; c++)
soma += b[c];
b[c] = soma; /* soma->ult.col. */
return NULL;
}
int main(void) {
int i, j;
inicializaMatriz(buffer, N, TAMANHO);
for (i = 0; i < N; i++)
soma_linha(buffer[i]);
imprimeResultados(buffer);
exit(0);
}Solução paralelizada
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#define N 5
#define TAMANHO 10
int buffer[N][TAMANHO];
void *soma_linha(void *linha) {
int c, soma = 0;
int *b = (int*) linha;
for (c = 0; c < TAMANHO - 1; c++)
soma += b[c];
b[c] = soma; /* soma->ult.col. */
return NULL;
}
int main (void) {
int i, j;
pthread_t tid[N];
inicializaMatriz(buffer, N, TAMANHO);
for (i = 0; i < N; i++) {
if (pthread_create(&tid[i], 0, soma_linha, buffer[i]) == 0) {
printf("Criada a tarefa %d\n", tid[i]);
} else {
printf("Erro na criação da tarefa\n");
exit(1);
}
}
for (i = 0; i < N; i++) {
pthread_join(tid[i], NULL);
}
printf("Terminaram todas as threads\n");
imprimeResultados(buffer);
exit(0);
}Exemplos de Erros Comuns
Quando estamos a criar programas paralelizados, podem ocorrer erros que nunca aconteceriam em programas sequenciais.
Vamos ver um exemplo que simula o levantamento de dinheiro de uma conta bancária.
struct {
int saldo;
// outras variáveis, ex. nome do titular, etc.
} conta_t;
int levantar_dinheiro(conta_t *conta, int valor) {
if (conta->saldo >= valor) {
conta->saldo = conta->saldo - valor;
} else {
valor = -1;
}
assert(conta->saldo >= 0);
return valor;
}Se a função for chamada por várias threads, pode acontecer que conta->saldo mude o seu valor incorretamente!
struct {
int saldo;
// outras variáveis, ex. nome do titular, etc.
} conta_t;
int levantar_dinheiro(conta_t *conta, int valor) {
conta->saldo = conta->saldo - valor;
return valor;
}O código equivalente em assembly seria o seguinte:
mov AX, SALDO ; carrega conteúdo da posição de memória
; SALDO para registo geral AX
mov BX, VALOR ; carrega conteúdo da posição de memória
; VALOR para registo geral BX
sub AX, BX ; efetua subtração AX = AX - BX
mov SALDO, AX ; escreve resultado da subtração na
; posição de memória SALDOAo vermos o código assembly desta função, podemos reparar que entre a chamada das variáveis
para os registos e a voltar a guardar o valor nas variáveis, o seu valor pode sofrer alteração
por outras threads que possam estar a escrever sobre elas.
Temos assim que evitar que threads acedam ao mesmo endereço de memória ao mesmo tempo.
IMPORTANTE: É sempre má ideia assumir que uma operação em C é indivisível!!!
Exemplo de Uso de Processos
Chromium:
- No browser Chromium, criar um novo separador causa a chamada do
fork; - Processo filho usado para carregar e executar scripts dos sites abertos nesse separador;
- Permite que separadores não obtenham informação sobre os outros separadores (isolamento).
IMPORTANTE: É sempre má ideia assumir que uma operação em C é indivisível!!!
Slides: