Anteriormente estudámos o movimento de corpos apenas a uma dimensão.
No entanto, vários movimentos precisam mais do que uma dimensão para serem representados,
como o lançamento de projéteis, movimentos circulares, etc.
Para introduzir o estudo da cinemática a 2 dimensões, vamos estudar o lançamento de projéteis
(i.e. bala disparada de um canhão, chuto de uma bola que faz um "balão", etc).
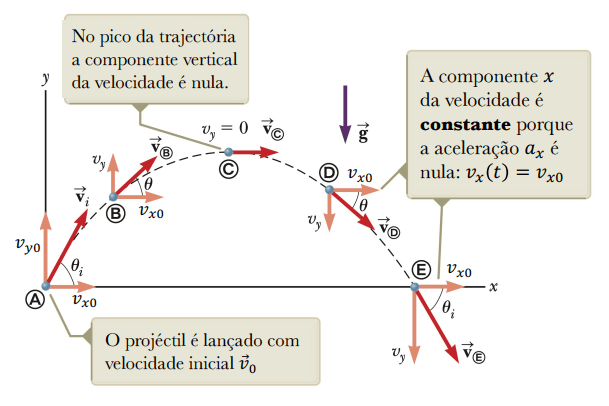
Na sua generalidade, neste tipo de movimentos temos uma velocidade inicial, oblíqua a ambos os eixos (x e y).
A única força a atuar no corpo é a força gravítica, atuando apenas na componente vertical da velocidade.
Podem existir variações deste tipo de exercícios em que seja necessário considerar outras forças,
mas não é difícil fazer a adaptação do raciocínio abaixo.
Mas o que é isto de componente vertical e componente horizontal? Bem, agora que estamos a trabalhar a mais que uma dimensão,
passamos a ter de definir o movimento do corpo segundo dois eixos, x e y:
Escrever a posição e a velocidade com as equações acima permite-nos facilmente estender estes conhecimentos para 3D.
No entanto, por simplificação, vamos desdobrar as equações acima:
O projétil é lançado com uma velocidade inicial v0, com componentes vx,0 e vy,0 não nulas (se fossem nulas, estaríamos perante um movimento 1D).
A única força a atuar no corpo é a força gravítica, pelo que:
a=ayey - a aceleração apenas tem componente vertical
vx≡constante - a velocidade horizontal é constante visto que a aceleração horizontal é nula
No ponto mais alto da trajetória, tal como no lançamento vertical,
a velocidade vertical, vy, é nula.
Vejamos um exemplo, que ilustra melhor este conceito.
Exemplo
Um estudante de engenharia informática está a brincar com uma Nerf, e acidentalmente dispara uma bala.A bala sai da arma a uma altura de 1.5m em relação ao chão e com uma velocidade de 5m/s, que faz θ=60° com o chão.Considerando que a única força que atua no corpo é a força gravítica, g=9.8m/s2, determine o seguinte:
a) a altura máxima atingida
O primeiro passo é decompor a velocidade inicial na componente horizontal e vertical.
Através de trigonometria, obtemos o seguinte:
Como já estudámos anteriormente no lançamento vertical,
o corpo atinge a altura máxima quando a sua velocidade (vertical) é nula, invertendo o sentido.
Então, vamos determinar o instante em que isto acontece.
vy(t)=0⇔4.33−9.8t=0⇔t=0.442s
Agora que sabemos em que instante a velocidade vertical é nula, isto é, em que a altura é máxima, basta
substitui-lo na equação das posições para sabermos a altura máxima.
y(0.442)=1.5+4.33×0.442−29.8×0.4422=3.39m
Assim, a altura máxima atingida pela bala é 3.39m.
b) o alcance da bala
A bala embate no chão quando a sua altura é zero.
Começamos por determinar o instante em que isto acontece.
y(t)=0⇔1.5+4.33t−29.8t2=0⇔t=−0.266s∨t=1.15s
O valor negativo para o tempo não faz sentido no contexto do problema, pelo que o descartamos:
t=−0.266s∨t=1.15s⟹t=1.15s
Agora que já sabemos o instante em que a bala embate no chão, podemos obter a posição horizontal da bala neste instante (alcance).
x(1.15)=2.50×1.15=2.88m
Assim, o alcance da bala é 2.88m.
c) a velocidade com que a bala embate no chão pela 1ª vez
Sabendo o instante em que a bala embate no chão, podemos obter ambas as componentes da velocidade quando a bala embate no chão.
Assim, a velocidade com que a bala embate no chão é:
v=2.50ex−6.94ey(m/s)
Coordenadas Polares
Por vezes, especialmente quando estamos a estudar movimentos circulares, pode dar mais jeito usar outro
tipo de coordenadas, as coordenadas polares.
Em vez de representarmos a posição (entre outros) de um corpo através da sua posição x e y, isto é, por coordenadas cartesianas,
utilizamos a sua distância à origem, assim como o ângulo com a mesma.
Ao contrário de nas coordenadas cartesianas, os vetores unitários das coordenadas polares (er e eθ) variam
de direção ao longo do tempo e da trajetória do ponto:
o vetor er aponta da origem para o ponto
o vetor eθ é perpendicular a er e aponta no sentido contrário aos ponteiros do relógio (sentido positivo)
Tal como nas coordenadas cartesianas, os vetores unitários têm módulo 1.
Conversão entre Coordenadas Cartesianas e Polares
Podemos exprimir os vetores unitários das coordenadas polares da seguinte forma:
ereθ==cosθex−sinθex+sinθey+cosθey
Irá ser-nos útil saber as derivadas destes vetores unitários, para determinarmos a velocidade e aceleração de um corpo.
Visto que θ é uma função θ≡θ(t), temos de ter atenção quando efetuamos a derivada de er e eθ.
Para isto, temos de utilizar a derivada da composta.
Define-se θ˙=dtdθ e θ¨=dt2d2θ para simplificar a notação.
Posição, Velocidade e Aceleração em Coordenadas Polares
Agora que sabemos derivar os vetores unitários er e eθ, podemos escrever as expressões da posição, velocidade e aceleração
neste sistema de coordenadas.
Posição:
O corpo está a uma distância r≡r(t) da origem.
Visto que o vetor unitário er tem direção da origem para a posição do corpo, podemos escrever a posição do corpo na forma: